【dsPIC33FJ128MC802】PMPを使ってみる。秋月LCD-SD1602と接続。
◆dsPIC33FJ128MC802で秋月LCDキャラクタモジュールをPMPで使ってみます。
参考
前回の記事
前回の記事ではポート制御でLCDを動かしました。
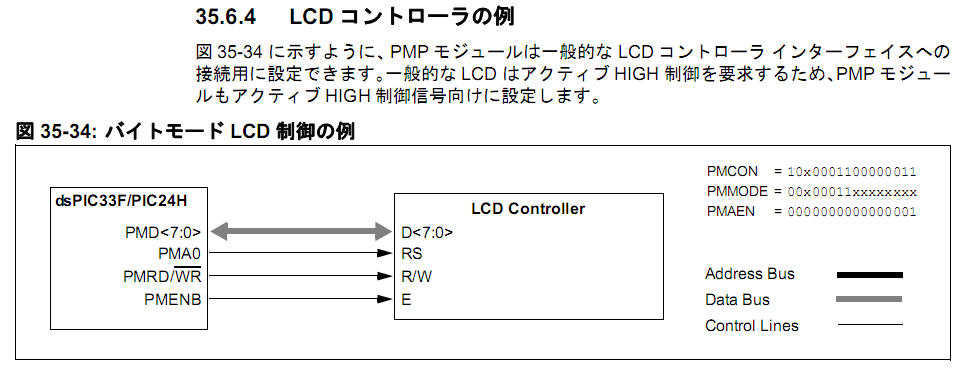
LCDとPICの接続表
| 秋月LCD SD1602 | dsPIC33F | function |
| RS<4> | PMA0 | Command/Data |
| R/W<5> | PMRD/PMWR | Read/Write |
| E<6> | PMENB | DataEnable |
| DB0<7> | PMD0 | D0 |
| DB1<8> | PMD1 | D1 |
| DB2<9> | PMD2 | D2 |
| DB3<10> | PMD3 | D3 |
| DB4<11> | PMD4 | D4 |
| DB5<12> | PMD5 | D5 |
| DB6<13> | PMD6 | D6 |
| DB7<14> | PMD7 | D7 |
設定
リファレンスマニュアル:DS70299Cを参考にしましたが情報が少なすぎです。
接続方法とレジスタ設定がちょとしか書いてない・・・
R/Wの接続方法がわかんなすぎです。
めげずにレジスタ設定でHighになってるBITの説明を何度も読み返すことで理解できました!
やってることとしては。。。
PMPの設定
パラレルポートモードビットMODEの設定
DataEnableが必要なLCDなのでマスターモード1で設定します。
”11”の場合:MasterMode1になります。
PMMODEbits.MODE = 0b11;
読み/書きイネーブルビットPTRDENの設定
MasterMode1の時PTRDENビットを1にすると
PICのPIN24がPMRD/PMWRで機能します。
PMCONbits.PTRDEN = 1;
"1″の時をRead、"0″の時をWriteに設定したいので
RDSPビットを"1″に設定します。
PMCONbits.RDSP = 1;
LCDのR/Wに対し有効に機能します。
書き込みイネーブルビットPMENBの設定
MasterMode1の時PTWRENビットを1にすると
PICのPIN25がPMENBで機能します。
PMCONbits.PTWREN = 1;
EピンをActiveHighにしたいのでMasterMode1の時は
WRSPビットを"1″に設定します。
PMCONbits.WRSP = 1;
LCDのEに対し有効に機能します。
アドレスビット0を設定
DIP28pinのPICマイコンの場合アドレスは2つあります。
PMA0でLCDのRSを制御します。
PMAENbits.PTEN0 = 1;
PMAENレジスタのPTEN0ビットを"1″にすることでPMA0(PIN10)が有効になります。
RSビットは"1″の時はデータとして扱われ、"0″の時はコマンドとして扱われます。
LCDのRSに対し有効に機能します。
LCDコマンド書き込み
①PMADDRbits.ADDR0を"0″します。
②PMDIN1にデータを入れる。
LCDのデータ書き込み
①PMADDRbits.ADDR0を"1″にします。
②PMDIN1にデータを入れる。
ソース
PIC24Fのペリフェラルライブラリーのソースを参照に流れをつかみました。
//========================================================= // TEST //========================================================= //== ヘッダファイル ============================================ #include <p33fj128mc802.h> #include <stdio.h> //== define ============================================================= //== configuration ====================================================== _FBS(BSS_NO_FLASH //No Boot program Flash segment & BWRP_WRPROTECT_OFF); //Boot Segment may be written _FGS(GSS_OFF //User program memory is not code-protected & GWRP_OFF); //User program memory is not write-protected _FOSCSEL(FNOSC_FRCPLL //Internal Fast RC (FRC) w/ PLL & IESO_OFF); //Start-up device with user-selected oscillator source _FOSC(FCKSM_CSDCMD //Both Clock Switching and Fail-Safe Clock Monitor are disabled & IOL1WAY_ON // Allow Only One Re-configuration & OSCIOFNC_ON //OSC2 pin has digital I/O function & POSCMD_NONE); //Primary Oscillator Disabled _FWDT(FWDTEN_OFF); //Watchdog timer enabled/disabled by user software _FPOR(FPWRT_PWR128 //PowerOnReset_128ms & ALTI2C_OFF); //I2C mapped to SDA1/SCL1 pins _FICD(JTAGEN_OFF //JTAG is Disabled & ICS_PGD1); //Communicate on PGC1/EMUC1 and PGD1/EMUD1 //== interrupt_function_prototype ================================================ void __attribute__((interrupt,no_auto_psv)) _U1RXInterrupt(void); //UART_RX_Interrupt void __attribute__((interrupt,auto_psv)) _DMA0Interrupt(void); //DMA0_Interrupt //== DMA_UART ==================================================================== unsigned int rex_buf[10]__attribute__((space(dma))); //10byte //== UART ======================================================================== //== SD1602LCD用プロトタイプ ========================================================= void sd1602_init(void); //sd1602初期化 void sd1602_cmd_write(unsigned char data); //sd1602コマンド書き込み void sd1602_data_write(unsigned char data); //sd1602データ書き込み //== sd1602文字列書き込み(配列 + 行目 + 出力数) ======================================= void sd1602_string_write(char *data, char line, unsigned char count); //== MyTimer ===================================================================== void delay_us(unsigned int usec); //Timer1を利用したusec関数 void delay_ms(unsigned int msec); //msec関数 //== StringBox =================================================================== char test_box[10] = "test_mode"; //== original_struct ====================================================== struct{ unsigned pwm_out : 1; unsigned fan : 1; unsigned lamp : 1; }st_flag; //== main ================================================================== int main(void) { //== クロックの設定 ====================================================== //== Fcy=Fosc/2=7.37M*((PLLFBD+2)/(N2*N1))/2=39.61MHz ================ PLLFBDbits.PLLDIV = 41; //M=PLLFBD+2 CLKDIVbits.PLLPOST = 0; //N2=2 CLKDIVbits.PLLPRE = 0; //N1=2 OSCTUN = 0; //TuneFRC:7.37MHz RCONbits.SWDTEN = 0; //Disable Watch Dog while(OSCCONbits.LOCK != 1); //wait for PLL Lock //== AD切り替え ========================================================== AD1PCFGL = 0xffff; //全digital //=== TRISA =========================================================== TRISA = 0x0000; //initial_ //== TRISB ============================================================= TRISB = 0x0000; //input: //== i2c設定 ============================================================ //== TIMER1設定 ========================================================= T1CONbits.TON = 0; //<15>Timer1_OFF T1CONbits.TSIDL = 1; //<13>アイドルモード:Sleep中は停止 T1CONbits.TGATE = 0; //<6>ゲート積算時間:OFF T1CONbits.TCKPS = 0B00; //<5:4>_PS1:1 T1CONbits.TCS = 0; //<2>クロックソース:内部 IEC0bits.T1IE = 0; //割り込み拒否 IPC0bits.T1IP = 0; //優先レベル0 //== UART1設定 ========================================================= //== PMP_Initialize =================================================== PMMODE = 0x0000; PMMODEbits.MODE = 0b11; //<9:8>MastarMode_1 PMCON = 0x0000; //== port_select ==== //== R/W:PMRD/PMWR == PMCONbits.PTRDEN = 1; //<8>PMRD/PMWR_enable PMCONbits.RDSP = 1; //<0>PMRD/PMWR //== E:PMENB ======== PMCONbits.PTWREN = 1; //<9>PMWR/PMENB_enable PMCONbits.WRSP = 1; //<1>PMENB //== RS:PMA0 ======== PMAENbits.PTEN0 = 1; //<0>PMA0_enable //== wait == PMMODEbits.WAITE = 0B01; // PMMODEbits.WAITM = 0B0010; // PMMODEbits.WAITB = 0B01; // //== CN_Initialize =================================================== //== DMA_UART ======================================================== //== 前処理 ====================================================== //IPC2bits.U1RXIP = 6; //PriorityLevel_6 //IEC0bits.U1RXIE = 1; //UART_revInterrupt_enable //DMA0CONbits.CHEN = 1; //DMA0_enable //IEC0bits.DMA0IE = 1; //DMA0_interrupt_enable //sb1602_init(); //LCD初期化 PMCONbits.PMPEN = 1; //<15>PMP_enable sd1602_init(); //LCD初期化 sd1602_cmd_write(0x80); //== while文 =========================================================== while(1) { sd1602_string_write(test_box,2,9); sd1602_string_write(test_box,1,9); delay_ms(500); }//while(1) }//int main(void) //== delay_us関数 ================================================================= void delay_us(unsigned int usec) { TMR1 = 0; //TMR1=0 T1CONbits.TON = 1; //Timer1_start PR1 = 39; //PR1値:((目的値1usec)/(1サイクル:0.0025usec*PS)-1)=39 unsigned int i; for(i=0; i<usec; i++) { //タイマーフラグ待ち while(!IFS0bits.T1IF); //Timer1割り込みフラグチェック(IFS0bits.T1IF==0) IFS0bits.T1IF = 0; //割り込みフラグ下ろす }//for(i=0; i<usec; i++) }//void delay_usec(); //== delay_ms関数 ================================================================== void delay_ms(unsigned int msec) { unsigned int i; for(i=0; i<msec; i++) { delay_us(1000); //call:1000usec }//for }//void delay_ms //== DMA0_Interrupt ========================================================================= //== SD1602 initialize =================================================== void sd1602_init(void) { delay_ms(100); //100msec sd1602_cmd_write(0x30); //Function_set delay_ms(10); //4.1msec sd1602_cmd_write(0x30); //Function_set delay_ms(100); //100msec sd1602_cmd_write(0x30); //Function_set delay_ms(10); sd1602_cmd_write(0x38); //N=1:2line delay_ms(10); sd1602_cmd_write(0x06); //EntryMode delay_ms(1); sd1602_cmd_write(0x01); //ClearDisplay delay_ms(10); sd1602_cmd_write(0x0c); //DisplayOn delay_ms(1); } //sd1602_init(void) //== SD1602 Command Write =================================================== void sd1602_cmd_write(unsigned char data) { unsigned char sute_yomi; while(PMMODEbits.BUSY == 1); PMADDRbits.ADDR0 = 0; //RS=0_command_mode PMDIN1 = data; //data_out //busy_check TRISBbits.TRISB5 = 1; //PMD7_input do{ while(PMMODEbits.BUSY == 1); PMADDRbits.ADDR0 = 0; //RS=0_command_mode sute_yomi = PMDIN1; //data_in }while(PORTBbits.RB5 == 0); //PMD7_check TRISBbits.TRISB5 = 0; //output delay_us(40); }//void sd1602_cmd_write(unsigned char data) //== SD1602 Data_Write ==================================================== void sd1602_data_write(unsigned char data) { unsigned char sute_yomi; while(PMMODEbits.BUSY == 1); PMADDRbits.ADDR0 = 1; //RS=1_data_mode PMDIN1 = data; //data_out //busy_check TRISBbits.TRISB5 = 1; //PMD7_input do{ while(PMMODEbits.BUSY == 1); PMADDRbits.ADDR0 = 0; //RS=0_command_mode sute_yomi = PMDIN1; //data_in }while(PORTBbits.RB5 == 0); //PMD7_check TRISBbits.TRISB5 = 0; //output delay_us(40); }//void sd1602_data_write(unsigned char data) //== SD1602 String_Write ==================================================== void sd1602_string_write(char *data, char line, unsigned char count) { if(line == 1) //1行目 {sd1602_cmd_write(0x80);} else if(line == 2) //2行目 {sd1602_cmd_write(0xC0);} unsigned int i; for(i=0; i<count; i++) { sd1602_data_write(data[i]); }//for(i=0; i<count; i++) }//void sd1602_string_write(unsigned char *data, unsigned char count) //======================================================================== //=================================================================================
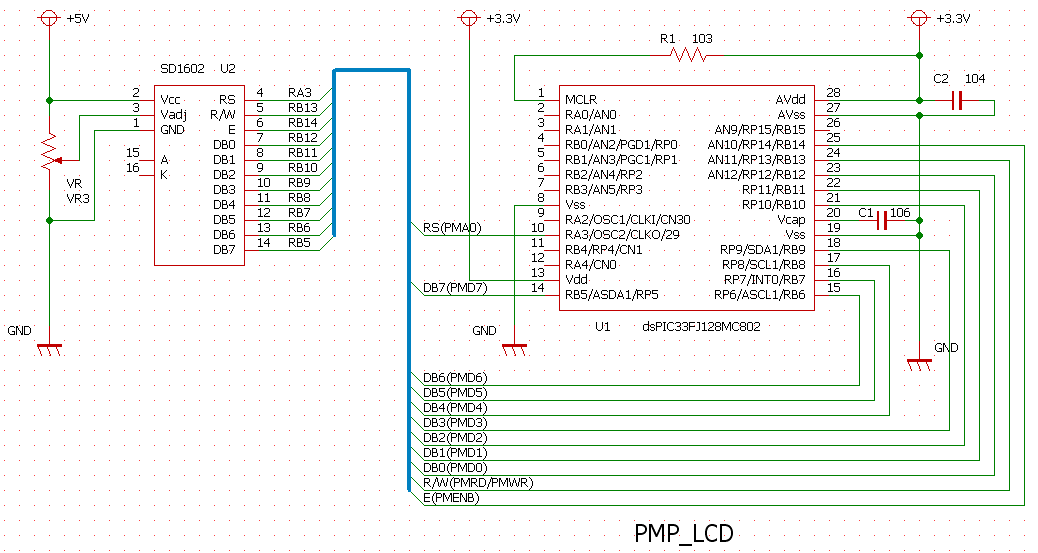
回路図
よろしければバナーをクリックお願いします!
